
June 26, 2026
The Engineering Dead End That Sent Researchers Back to Nature
For decades, the mining industry approached automation through a single conceptual lens: make machines bigger, stronger, and more powerful. The result was an extraordinary fleet of heavy equipment capable of moving enormous volumes of material on well-prepared surfaces. Yet as extraction frontiers push deeper underground, into structurally compromised zones, and eventually beyond Earth's atmosphere entirely, that paradigm is hitting a hard ceiling. The terrain becomes too unpredictable, the geometry too confined, and the physics too unforgiving for machines built on the assumption of flat ground and abundant power.
Insect-inspired mining robots represent the convergence of biological solutions with modern materials science, artificial intelligence, and precision manufacturing. The answer, increasingly, is not found in engineering manuals but in entomology textbooks. Ants, bees, and woodpeckers have spent hundreds of millions of years solving precisely the problems that stump modern robotics engineers: navigating irregular surfaces, coordinating complex collective tasks without centralised instruction, and doing all of it with remarkable energy efficiency. The research emerging from institutions across three continents suggests the results are startling.
When big ASX news breaks, our subscribers know first
What Insect-Inspired Mining Robots Actually Are
Insect-inspired mining robots are autonomous or semi-autonomous robotic systems that replicate the physical locomotion, sensory behaviour, or collective decision-making strategies observed in social and biomechanically efficient insects, including ants, bees, and woodpeckers, to navigate, extract, and process resources in environments too hazardous or inaccessible for conventional machinery.
This is not simply about making robots that look like insects. The deeper innovation lies in borrowing the operating logic that makes insects so effective, whether that is the decentralised task allocation of an ant colony, the exploration-before-harvest sequencing of a honeybee scout, or the dynamic grip mechanics of a woodpecker scaling vertical bark. Each of these behaviours has been studied, abstracted, and re-encoded into robotic decision trees and physical architectures.
Core Design Principles Drawn from the Insect World
The biological models being translated into mining robotics fall into four primary categories:
- Ant-colony task allocation: No central controller dictates who does what. Instead, individual units respond to local environmental signals, and coherent collective behaviour emerges organically. If one unit fails, the collective redistributes workload without any top-down instruction.
- Honeybee scouting protocols: Scout bees explore candidate resource sites before the colony commits foraging energy to harvest. This exploration-first logic, when applied to robotic swarms, eliminates redundant travel and dramatically reduces energy expenditure.
- Woodpecker climbing dynamics: Woodpeckers maintain grip on vertical and irregular surfaces through a combination of arrayed claw structures and dynamic weight redistribution. This mechanical logic is being translated directly into robotic leg design for operation on fractured rock faces, loose regolith, and low-gravity bodies.
- Origami-inspired folding geometry: Many insects fold complex wing and limb structures into compact resting configurations. Applying this principle to robot chassis design allows units to deploy in confined underground spaces or be packaged efficiently for space transport.
| Biological Inspiration | Engineering Application | Primary Benefit |
|---|---|---|
| Ant colony task division | Swarm task-sharing algorithms | Operational redundancy and resilience |
| Honeybee area scouting | Pre-harvest mapping protocols | Up to 80% reduction in travel distance |
| Woodpecker climbing mechanics | Claw-spine adhesion leg design | Grip stability on irregular terrain |
| Insect nervous system reflexes | Dynamic force-sensing actuators | Real-time agility and terrain response |
Two Research Streams Pushing the Field Forward
Stream One: Swarm Intelligence for Collective Underground Operations
Research published in the journal Natural Sciences by a team at the University of Adelaide has established what may be the most quantitatively significant finding in this field to date. The study examined how social insect coordination models could be applied to robotic swarms operating in mining contexts, testing multiple biological frameworks against baseline robotic systems that used no biologically derived protocols.
The core operating principle of swarm intelligence is that no single unit holds authority. Each robot operates according to shared behavioural rules, and complex, coordinated behaviour emerges from the interaction of many simple agents responding to local conditions. This mirrors precisely how an ant colony organises foraging, waste removal, and defence without any individual ant possessing a map of the whole operation.
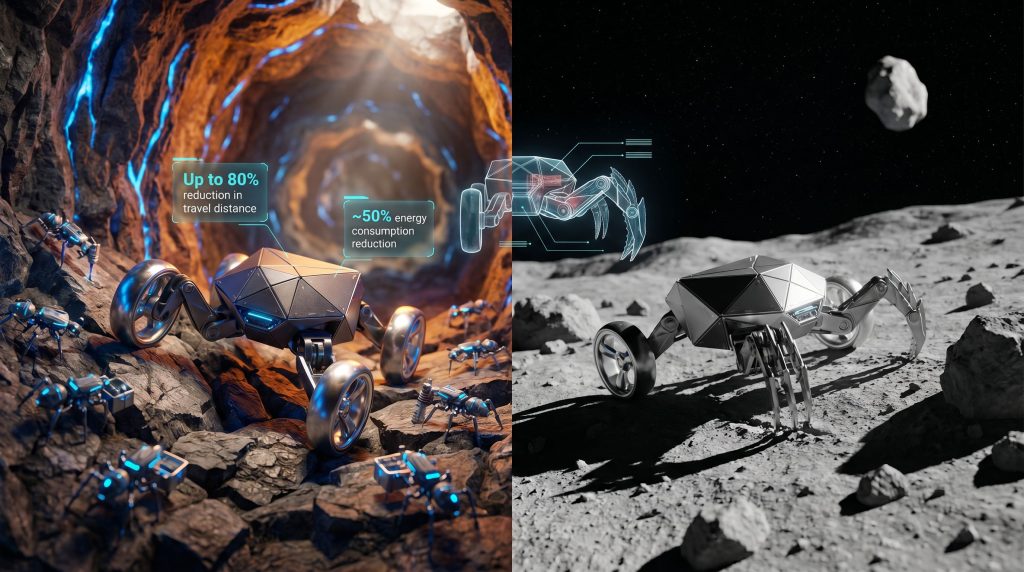
Furthermore, swarm robots inspired by bees and ants could transform future mining, according to the University of Adelaide's research team. Of the biological models tested, the honeybee-inspired configuration produced the most dramatic efficiency gains:
- Travel distance was reduced by up to 80% compared to baseline systems operating without biologically derived protocols
- Energy consumption was reduced by approximately 50% across comparable operational cycles
- The ant-inspired model demonstrated strong task execution and redundancy characteristics but was outperformed on spatial navigation efficiency by the honeybee approach
The honeybee model's superiority stems from its sequencing logic. Scouts identify and evaluate resource locations before the broader swarm commits extraction energy, meaning the collective never wastes movement on suboptimal targets. In a mining context, this translates directly to reduced mechanical wear, longer equipment lifespan, and meaningful cuts to operational energy budgets.
The implications compound significantly when you consider that underground mining operations already face substantial energy cost pressures, and space-based resource extraction will operate under conditions where energy is not simply expensive but finite and non-renewable during operation.
Stream Two: Bionic Locomotion for Microgravity and Extreme Terrain
While the University of Adelaide's research focuses on collective intelligence, a parallel development track at the China University of Mining and Technology (CUMT) addresses a fundamentally different problem: how does a robot move effectively when the surface beneath it cannot be trusted?
The CUMT team has developed a six-legged bionic robot prototype specifically engineered for lunar and asteroid resource extraction environments. A patent application has been filed by the research team for this design, which combines two distinct leg architectures within a single platform:
| Component | Design Feature | Functional Purpose |
|---|---|---|
| Wheel legs (x3) | Nickel-based titanium memory alloy construction | Shape recovery after impact; efficient traversal on smoother surfaces |
| Claw legs (x3) | Arrayed claw-spine structure modelled on woodpecker climbing mechanics | Adhesion and grip on rocky surfaces and loose regolith |
| Structural framework | Origami-inspired folding geometry | Compact pre-deployment packaging; adaptability in microgravity |
| Locomotion model | Woodpecker dynamic weight redistribution | Vertical surface navigation and irregular terrain grip |
The choice of nickel-based titanium memory alloy for the wheel legs is particularly notable. This class of material, known for its shape-memory properties, can deform under impact and then return to its original geometry without fatigue failure. This is a critical characteristic when the robot is operating on asteroid surfaces where collision with sharp regolith fragments is unavoidable and maintenance access is impossible. In addition, an insect-inspired robot that can fall and get up again demonstrates how resilience mechanics are being actively incorporated into real-world prototype development.
Why Conventional Mining Robots Cannot Compete on Difficult Terrain
The gap between insect-inspired systems and conventional robotic mining equipment is not primarily a matter of processing power or sensor quality. It is architectural. Traditional autonomous mining equipment, including the highly capable haulage trucks and drilling platforms already operating at scale in major mines, is built around several assumptions that break down in extreme environments:
- Prepared surfaces: Wheeled and tracked systems deliver outstanding performance on maintained haul roads but lose effectiveness rapidly on fractured rock, steep gradients, and unconsolidated material.
- Centralised control: Most conventional autonomous systems depend on continuous communication with a central controller. In underground environments with degraded signal propagation, or in deep space where communication latency makes real-time control impossible, this architecture fails.
- Rigid chassis geometry: Conventional equipment cannot reconfigure its physical structure in response to terrain. A robot that encounters an obstacle it was not programmed for either stops or damages itself.
- Inefficient path planning: Standard robotic path-planning algorithms tend toward thoroughness rather than efficiency, generating redundant movement that compounds energy costs and mechanical wear at scale.
What biological systems solve, and what insect-inspired mining robots inherit, is the ability to function without any of these assumptions being met. A swarm that loses 30% of its units to equipment failure continues operating. A claw-legged robot encountering an unexpected rock face adapts its gait dynamically rather than halting. The energy budget scales with task requirements rather than remaining constant regardless of output.
Deployment Horizons: Where These Systems Will Work First
Hazardous Underground Zones on Earth
The most immediate application is not in space but in the portions of existing terrestrial mines where human presence creates unacceptable risk. Post-blast inspection zones, areas of suspected ground instability, flooded drives, and confined stopes with inadequate ventilation all represent locations where conventional equipment is oversized and human entry is dangerous.
Swarm systems could function as a first-responder reconnaissance layer, entering these areas immediately after a blast or ground movement event to assess structural conditions, atmospheric hazards, and resource distribution before any human or large equipment re-entry. This single application alone would represent a meaningful safety improvement in underground hard-rock mining, an industry that continues to record fatalities in these exact scenarios. Mining automation technology is already reshaping how operators approach these high-risk zones.
Lunar In-Situ Resource Utilisation
The strategic importance of lunar resource extraction is growing as space agencies and commercial operators move toward sustained human presence on the Moon. Water ice deposits in permanently shadowed craters near the lunar poles represent both a life support resource and a feedstock for hydrogen-oxygen propellant, potentially enabling a refuelling economy in cislunar space.
The Lunar Whegs concept, a wheel-leg hybrid rover architecture developed specifically for regolith collection on irregular lunar terrain, represents one proposed solution. The microgravity environment fundamentally changes the mechanical calculus. Conventional wheeled rovers tend to lose traction on loose lunar regolith, particularly on slopes, because the low gravity reduces the normal force that creates friction. Claw-leg systems that grip rather than roll address this directly.
Asteroid Surface Operations
Asteroid surface operations present the most extreme version of the locomotion challenge. Gravitational acceleration on a small asteroid can be measured in millimetres per second squared, meaning a robot exerting ordinary operational forces risks launching itself off the surface entirely. The CUMT claw-leg architecture was developed in direct response to this grip-failure problem.
The economic case for asteroid mining, particularly platinum-group metals and rare earth elements, is well-established in theoretical terms. The engineering barrier has always been the question of how to stay on the surface long enough to extract anything. Insect-inspired adhesion mechanics offer a credible answer that wheeled systems cannot match. Furthermore, asteroid mining advances in recent years have heightened demand for precisely this kind of locomotion breakthrough.
The Nervous System Dimension: Dynamic Force Sensing
Research at West Virginia University has approached the biomimicry challenge from a different angle, studying the neural architecture of insect limbs rather than their collective behaviour or physical structure.
Insects continuously modulate the pressure their legs exert on a surface in real time, adjusting for changes in terrain resistance without conscious decision-making at a central level. Each limb responds autonomously to local mechanical feedback, enabling the insect to traverse irregular surfaces at speed without stumbling.
Translating this into robotic actuators means building leg control systems that sense ground resistance thousands of times per second and adjust force output accordingly, rather than executing pre-programmed movement sequences. The agility advantage this creates is significant: a robot with dynamic force-sensing legs can negotiate terrain that would immobilise a conventionally programmed system, even if both platforms have identical hardware specifications.
The next major ASX story will hit our subscribers first
Technical Barriers Remaining Before Commercial Deployment
The field is advancing rapidly, however several engineering challenges must be resolved before insect-inspired mining robots transition from prototype to operational deployment:
- Sensor durability: Underground mining environments expose sensors to fine abrasive dust, continuous vibration, high humidity, and electromagnetic interference from large electrical machinery. Current sensor generations degrade under these conditions faster than operational economics can justify.
- Power autonomy: Battery energy density remains the binding constraint on operational range and endurance, particularly in space applications where recharging infrastructure does not exist and solar power availability depends on orbital geometry.
- Swarm communication in signal-denied environments: Maintaining reliable coordination signals between multiple swarm units in underground environments, where radio frequency signals attenuate rapidly through rock, requires purpose-built mesh networking solutions that are still maturing.
- Payload capacity versus mobility trade-off: Lightweight, agile platforms that excel at locomotion typically sacrifice the carrying capacity needed for meaningful extraction volumes. Finding the right balance for each application domain is an ongoing optimisation challenge.
| Development Phase | Focus Area | Key Milestone |
|---|---|---|
| Phase 1 (Near-Term) | Sensor hardening and battery optimisation | Extended operational endurance in underground conditions |
| Phase 2 (Mid-Term) | Swarm communication protocols | Reliable coordination in signal-denied environments |
| Phase 3 (Long-Term) | Microgravity locomotion validation | Lunar or asteroid field deployment readiness |
Competitive Positioning Against Other Automation Technologies
Insect-inspired mining robots do not exist in isolation. They compete for investment attention and development resources alongside a range of other automation technologies, each with distinct strengths and limitations:
| Technology Category | Operational Strength | Key Limitation | Insect-Robot Advantage |
|---|---|---|---|
| Conventional autonomous haulage | High payload, proven at scale | Requires prepared haul roads | Terrain-agnostic locomotion |
| Drone-based inspection systems | Rapid aerial coverage | No physical extraction capability | Extraction combined with navigation |
| Traditional robotic arms | Precision manipulation | Fixed position, no mobility | Fully mobile and adaptive |
| Insect-inspired swarm robots | Decentralised, energy-efficient | Early-stage, limited payload | Redundancy, efficiency, scalability |
The key differentiator is not any single performance metric but the combination of terrain adaptability, energy efficiency, and operational resilience that no other category currently provides. Swarm redundancy in particular is a qualitatively different value proposition: a conventional autonomous haulage fleet that loses a unit loses proportional capacity, whereas a swarm that loses units redistributes workload without service interruption.
Safety and ESG: The Business Case Beyond Engineering
Removing Humans from the Most Dangerous Tasks
Mining's fatality statistics are concentrated in a handful of high-risk activities: confined space entry, post-blast inspection, ground fall incidents, and operations in proximity to unstable structures. These are precisely the tasks for which swarm reconnaissance systems are best suited.
Deploying insect-inspired robots as the first entry layer in these scenarios would not merely reduce fatalities in absolute terms. It would also reduce the industry's insurance liabilities, regulatory compliance costs, and the reputational exposure that accompanies major safety incidents, each of which carries measurable financial weight for mining operators.
The Energy and Emissions Dimension
A 50% reduction in energy consumption for robotic mining operations, as demonstrated in the Adelaide University swarm research, is not only an operational cost benefit. It translates directly to reduced Scope 1 emissions from mining automation systems, a metric that institutional investors and mining majors are tracking with increasing rigour against net-zero operational targets.
The smaller physical footprint of swarm units relative to conventional heavy machinery also reduces surface disturbance per unit of resource extracted. This is a consideration that is becoming material in environmental impact assessments and social licence negotiations. Consequently, the broader push toward responsible extraction, including the sustainable development of polymetallic nodules on the ocean floor, reflects a similar industry-wide shift in values.
Frequently Asked Questions
What insects are used as models for mining robot design?
The primary biological models are ants for collective task allocation and decentralised coordination, honeybees for area scouting and energy-efficient navigation, and woodpeckers for climbing mechanics and surface adhesion. Insect nervous system architecture is additionally studied for dynamic force-sensing capabilities in robotic actuators.
How much more energy-efficient are swarm robots compared to conventional systems?
Research published in Natural Sciences by the University of Adelaide indicates that honeybee-inspired swarm configurations can reduce energy consumption by approximately 50% and travel distance by up to 80% relative to robotic systems operating without biologically derived coordination protocols.
Are insect-inspired mining robots currently operational in real mines?
As of mid-2026, the technology remains in the advanced research and prototype phase. Sensor durability, battery autonomy, and swarm communication in signal-degraded underground environments are the primary barriers to commercial deployment. However, the integration of AI in mining operations is accelerating the pace at which these systems are becoming viable.
What materials are used in the CUMT bionic space mining robot?
The wheel legs are constructed from nickel-based titanium memory alloy, selected for its shape-recovery properties after mechanical impact, which is critical for navigating the unpredictable surfaces of asteroid and lunar environments.
What is the patent status of these systems?
The CUMT research team has filed a patent application for their six-legged bionic space mining robot prototype. The University of Adelaide's swarm system research is published in Natural Sciences, but commercial patent status for that work has not been publicly confirmed.
The Paradigm Shift Underway
What makes insect-inspired mining robots significant is not that they improve on existing automation by incremental degrees. It is that they represent a categorical rethinking of what mining machinery is supposed to be. The industry has spent over a century optimising for scale and power. The next phase of mining automation may instead optimise for adaptability, resilience, and efficiency measured in biological rather than mechanical terms.
Space agency programmes at NASA, ESA, and CNSA are actively developing lunar and asteroid resource extraction roadmaps in which surface mobility is identified as a critical unsolved problem. The timing alignment between those programmes and the maturation of insect-inspired locomotion research is not coincidental. Researchers developing bionic mining platforms are building toward a deployment environment that is becoming real on a timescale measured in years rather than decades.
For the terrestrial mining industry, the near-term value proposition is clearer still: safer access to hazardous zones, meaningfully lower energy costs in automated operations, and a scalable robotics architecture that grows in capability by adding units rather than replacing entire systems. The insects had it figured out long before the engineers caught up.
This article draws on research published in Natural Sciences by the University of Adelaide and technical coverage from Mining Magazine. Readers seeking further context on swarm intelligence applications in industrial settings are encouraged to consult primary research published in peer-reviewed robotics and materials science journals. Forward-looking statements regarding deployment timelines and commercial applications involve inherent uncertainty and should not be interpreted as investment advice.
Want to Be First When the Next Major Mining Discovery Hits the ASX?
Discovery Alert's proprietary Discovery IQ model scans ASX announcements in real time, instantly translating complex mineral data across 30+ commodities into clear, actionable opportunities — so subscribers are positioned ahead of the broader market the moment a significant discovery is announced. Explore historic discoveries and their extraordinary returns, then begin your 14-day free trial at Discovery Alert to secure your market-leading edge.

